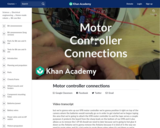
In this video we re-wire Bit-zee's motors to include longer wires and …
In this video we re-wire Bit-zee's motors to include longer wires and then we re-attach them to his frame. This video shows more detail than the previous motor video and it is shot in real time. This video also shows how to route the wires. Created by Karl Wendt.
Aaron Parness leads the Extreme Environment Robots Group at the Jet Propulsion …
Aaron Parness leads the Extreme Environment Robots Group at the Jet Propulsion Laboratory. Learn how Aaron went from ski bum to building robots for JPL.
This resource is a video abstract of a research paper created by …
This resource is a video abstract of a research paper created by Research Square on behalf of its authors. It provides a synopsis that's easy to understand, and can be used to introduce the topics it covers to students, researchers, and the general public. The video's transcript is also provided in full, with a portion provided below for preview:
"Although it might appear simple, the box jellyfish has evolved a system of vision nearly as complex as our own. The jellyfish has four sets of six eyes linked to a gravity-detecting structure known as a statolith. Inspired by this combination of natural light and gravity sensors, researchers reporting in the _Journal of Bionic Engineering _are paving the way toward improved environmental detection in robots. They’ve devised a new method for calibrating a camera linked to an inertial measurement unit, or IMU, on a robotic arm. By programming the robotic arm to spiral toward a set of visual markers during calibration, this new method produces smaller reprojection errors than popular calibration methods such as ICSR and Kalibr. Using this calibration approach, the team envisions a jellyfish-like robotic system equipped with a camera and IMU at its joints..."
The rest of the transcript, along with a link to the research itself, is available on the resource itself.
This class introduces elementary programming concepts including variable types, data structures, and …
This class introduces elementary programming concepts including variable types, data structures, and flow control. After an introduction to linear algebra and probability, it covers numerical methods relevant to mechanical engineering, including approximation (interpolation, least squares and statistical regression), integration, solution of linear and nonlinear equations, ordinary differential equations, and deterministic and probabilistic approaches. Examples are drawn from mechanical engineering disciplines, in particular from robotics, dynamics, and structural analysis.
This class introduces elementary programming concepts including variable types, data structures, and …
This class introduces elementary programming concepts including variable types, data structures, and flow control. After an introduction to linear algebra and probability, it covers numerical methods relevant to mechanical engineering, including approximation (interpolation, least squares and statistical regression), integration, solution of linear and nonlinear equations, ordinary differential equations, and deterministic and probabilistic approaches. Examples are drawn from mechanical engineering disciplines, in particular from robotics, dynamics, and structural analysis. Assignments require MATLAB® programming.
Students act as civil engineers developing safe railways as a way to …
Students act as civil engineers developing safe railways as a way to strengthen their understanding of parallel and intersecting lines. Using pieces of yarn to visually represent line segments, students lay down "train tracks" on a carpeted floor, and make guesses as to whether these segments are arranged in parallel or non-parallel fashion. Students then test their tracks by running two LEGO® MINDSTORMS® NXT robots to observe the consequences of their track designs, and make safety improvements. Robots on intersecting courses face imminent collision, while robots on parallel courses travel safely.
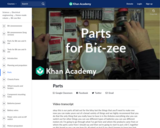
In this video we take a quick a look at some of the parts we used to make Bit-zee. Although we highly recommend you create your own Bit-zee using parts from products that people would otherwise throw away. Created by Karl Wendt.
Short Description: A guide to processing multi-spectral imagery MetaShape. Image alignment, generation …
Short Description: A guide to processing multi-spectral imagery MetaShape. Image alignment, generation of dense point clouds, digital surface and terrain models and orthomosaics is covered as well as the export of dense point clouds and orthomosaics to external software.
Long Description: A complete guide (including sample data set) to processing multi-spectral imagery using Agisoft MetaShape Pro with ground control points. Image alignment, generation of dense point clouds, digital surface and terrain models and orthomosaics is covered as well as the export of dense point clouds and orthomosaics to external software.
Word Count: 4900
(Note: This resource's metadata has been created automatically by reformatting and/or combining the information that the author initially provided as part of a bulk import process.)
This resource is a video abstract of a research paper created by …
This resource is a video abstract of a research paper created by Research Square on behalf of its authors. It provides a synopsis that's easy to understand, and can be used to introduce the topics it covers to students, researchers, and the general public. The video's transcript is also provided in full, with a portion provided below for preview:
"It might look like a corkscrew on the loose, but programmable microswimmers like this could one day help doctors deliver precision medical treatment. Their bacteria-inspired motion is made possible by magnetic particles embedded throughout their helical body. By applying an external magnetic field, the robots can be made to swim along any path, in two dimensions or three. Their ability to shape-shift on command comes from the programmable nature of polylactic acid, which can be deformed into any arbitrary shape and revert to its original shape by applying heat. That makes each microswimmer capable of delivering cargo or expanding into a stent to provide support. Small, versatile, and easy to fabricate, these microrobots could one day help doctors treat areas that are otherwise inaccessible to modern medicine..."
The rest of the transcript, along with a link to the research itself, is available on the resource itself.
Students learn about the concept of pushing, as well as the relationship …
Students learn about the concept of pushing, as well as the relationship between force and mass. Students practice measurement skills using pan scales and rulers to make predictions about mass and distance. A LEGO MINDSTORMS(TM) NXT robot is used to test their hypotheses. By the end of the activity, students have a better understanding of robotics, mass and friction and the concept of predicting.
No restrictions on your remixing, redistributing, or making derivative works. Give credit to the author, as required.
Your remixing, redistributing, or making derivatives works comes with some restrictions, including how it is shared.
Your redistributing comes with some restrictions. Do not remix or make derivative works.
Most restrictive license type. Prohibits most uses, sharing, and any changes.
Copyrighted materials, available under Fair Use and the TEACH Act for US-based educators, or other custom arrangements. Go to the resource provider to see their individual restrictions.