Ce chapitre est consacré à la rhizarthrose qui est une pathologie fréquente. …
Ce chapitre est consacré à la rhizarthrose qui est une pathologie fréquente. Sont abordés successivement, la définition, la pathogénie, l'épidémiologie, la présentation clinique, les examens complémentaires, la classification et le traitement.
The Shiny@UCLouvain platform is a repository for sharing teaching resources created in …
The Shiny@UCLouvain platform is a repository for sharing teaching resources created in Shiny for the Catholic University of Louvain (UCLouvain) with the aim of teaching statistics with interactive apps. The list of apps (Inference, Probability, Distributions, Central Limit Theorem, Confidence intervals, Hypothesis test on the mean, Bootstrap confidence intervals, Design of Experiments , ...) associated with the RShiny@UCLouvain platform can be found at https://sites.uclouvain.be/RShiny/main.html . The source code of the apps can be found at https://forge.uclouvain.be/rshiny_uclouvain .
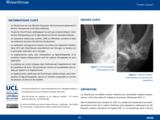
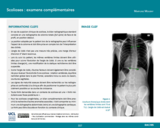
Les scolioses congénitales sont des malformations congénitales tridimensionnelles, résultant d’anomalies de développement …
Les scolioses congénitales sont des malformations congénitales tridimensionnelles, résultant d’anomalies de développement du sclérotome à la période embryologique. Les hémivertèbres, les barres congénitales et les fusions costales sont les anomalies les plus fréquemment rencontrées. Elles peuvent être associées entre elles, surtout lorsqu’elles rentrent dans le cadre d’une affection syndromique.
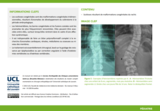
Ce chapitre traite de la Myopathie de Duchenne de Boulogne, de l'Amyotrophie …
Ce chapitre traite de la Myopathie de Duchenne de Boulogne, de l'Amyotrophie Spinale Infantile et de la paralysie cérébrale. Les causes musculaires des scolioses neuromusculaires sont essentiellement représentées par les myopathies ; la plus fréquente étant la dystrophinopathie de Duchenne de Boulogne. Les causes neurologiques sont soit centrales, représentées surtout par les séquelles de paralysie cérébrale, soit périphériques, représentées surtout par la poliomyélite au niveau mondial et l’amyotrophie spinale infantile de type 2 en Europe.
(EN) The resource is a simulation environment where one or several mobile …
(EN) The resource is a simulation environment where one or several mobile robots compete against each other in order to get the highest possible score for their team. The said robots have a system of differential-drive wheels to move. Their aim is to autonomously collect several targets spread over the playground, bring them back to their base, while avoiding contacts with the opponent robots. Reaching this goal requires developing a controller (coded in C/C++) providing the appropriate voltage to the robot’s wheels, as a function of sensory inputs such as wheel velocity, touch sensors, or beacon detector. Learning outcomes of such a project include velocity control of DC motor, trajectory control, development of path-finding algorithms (optimal path search), avoidance of fixed obstacle and moving opponents, and the development of a high-level strategic decision module. This environment can further be used by the teacher to show concepts related to a mobile robotics class /// (FR) La ressource est un environnement de simulation dans lequel un ou plusieurs robots mobiles s'affrontent afin d'obtenir le score le plus élevé pour leur équipe. Les robots en question utilisent un système de roues à vitesse différentielle pour se déplacer. Leur objectif est de collecter de manière autonome différentes cibles présentes sur le terrain de jeu, afin de les ramener à leur base, le tout en évitant de toucher les robots de l'équipe adverse. Pour ce faire, les étudiants doivent développer un contrôleur (en C/C++) capable de fournir de manière autonome les tensions adéquates aux moteurs du robot, sur base d'informations sensorielles telles que la vitesse des roues, de capteurs de toucher ou de détection de balises. Les compétences de ce projet incluent l'asservissement en vitesse de moteurs DC, le contrôle de trajectoires, le développement d'algorithmes de path-finding (recherche de chemin optimal), l'évitement d'obstacles et d'adversaires mobiles, ainsi que le développement d'un module stratégique de prise de décision. Cet environnement peut également être utilisé par l'enseignant pour montrer en cours les concepts liés au contrôle de robots à roues.
This set of slides, covering the topics of Software Maintenance and Evolution, …
This set of slides, covering the topics of Software Maintenance and Evolution, are the course lectures of a course LINGI2252 “Software Maintenance and Evolution”, given by Prof. Kim Mens at UCLouvain, Belgium
Contient la partie théorique du support du cours SINF1252 donné aux étudiants …
Contient la partie théorique du support du cours SINF1252 donné aux étudiants en informatique à l’Université catholique de Louvain (UCL). Consulter la page du cours pour d'autre formats et exercices => http://sites.uclouvain.be/SystInfo/
Tables de probabilités et de statistiques : Table de calcul de probabilité …
Tables de probabilités et de statistiques : Table de calcul de probabilité pour la loi binomiale Table de calcul de probabilité pour la loi normale Table des quantiles de la v.a. Chi-Carré Table des quantiles de la v.a. Fisher Table des quantiles de la v.a. Normale réduite Table des quantiles de la v.a. Student
No restrictions on your remixing, redistributing, or making derivative works. Give credit to the author, as required.
Your remixing, redistributing, or making derivatives works comes with some restrictions, including how it is shared.
Your redistributing comes with some restrictions. Do not remix or make derivative works.
Most restrictive license type. Prohibits most uses, sharing, and any changes.
Copyrighted materials, available under Fair Use and the TEACH Act for US-based educators, or other custom arrangements. Go to the resource provider to see their individual restrictions.